Aerial 3D Scanning
Introduction
This exercise explores two emerging technologies that have matured in recent years.
- Photogrammetry
- Small Unmanned Aerial Vehicle (UAV) with a photography payload (consumer drone).
Combining these two tools allows users to generate high resolution imagery and models. Surveys and maps can theoretically be created of large areas on lower budgets with commercial-grade accuracy and resolution.
Example 3D Scan
This is an example of a survey hosted on SketchFab. Use the settings to increase the texture resolution. (left click and drag to rotate, right click and drag to pan)
Safety and Legal Considerations
Working with drones requires consideration of the associated legal and safety factors. DIDSA advises anyone experimenting with drones to familiarise themselves with local regulations and general safety. DIDSA takes no responsibility for any efforts to emulate the exercise described here.
Primary Objectives
- Successfully generate a 3D textured model using images captured by a drone
- Identify a procedure by which DIDSA can carry out area surveys.
Secondary Objectives
- Analyse the data produced and identify potential commercial applications.
- Professional development for DIDSA personnel growing skills in drone operations and data processing.
Research
Software
There are multiple software options available to achieve the goals of this exercise. Focus will be directed towards one called Open Drone Mapping (ODM). This benefits from the following advantages:
- It can produce commercial grade models and textures.
- It includes tools to analyse the data including taking measurements
- It is open source and its development has benefitted from tremendous amounts of testing by the community.
- The community and developers have produced a huge amount of support material for those wishing to experiment.
- It can be run locally and does not require that data is uploaded to external servers and cloud processed
- It is available under GNU AGPL v3
Disadvantages include:
- It is complicated to install and run. The learning curve for non-developers is quite intimidating. Paid options are available to simplify this and support a deserving project with skilled developers.
- As the software is run locally, the hardware requirements are very high. Memory is particularly crucial. 32Gb is sufficient to start but larger data sets will demand more. This can be overcome by leveraging the ODM cloud based processing option for a fee.
In this case, the flexibility offered by open source software has been a key factor in the decision. ODM also offers an “on ramp” to using the software if the user is technically capable.
Hardware
Technically, any drone imagery could be processed using ODM. However, certain attributes improve the output data.
The camera resolution should be as high as possible to minimise the area covered by each pixel. ODM is able to leverage metadata within the photos to improve outputs so the drone should be able to record the following:
- GPS Lat and Long
- Height above sea level
- Delta height from take-off position
- Heading
- Gimbal angle
- Camera make/model for lens distortion and sensor information
Based on the market at the time of procurement, a DJI Air 2S drone has been selected as DIDSA’s aerial platform. Another desirable feature is automated flight pathing. This is available on the Air 2S via third party software Litchi.
Equipment and Software Summary
- Drone, DJI Air 2S
- Laptop’s minimum specification is dependent on the size of the data set
- WebODM from Open Drone Map
- Litchi, Drone control software
- Optional, 3D modelling software to view and edit outputs. E.g. Blender, Fusion, etc.
Process
The process will be split into three stages: data acquisition, data processing, and output analysis. These require different skill-sets and equipment.
Data Acquisition
The data set required is a series of photos of the area to be surveyed. The parameters of these images influence the quality of the end product and, as always, there are certain trade-offs between quality and processing time, cost and speed. The following considerations must be made when planning data collection:
- Resolution: Higher resolution images will increase the resolution of the textures in the final 3D model. They will also increase processing time and required computational power.
- Number of images: A greater overlap of images will increase the point cloud density and accuracy. More images will also increase the processing time and hardware requirements.
- Altitude: A higher altitude during photography will reduce the number of photos required to survey an area. It will also mean that a single pixel will cover a larger amount of ground. This reduces the final quality of 3D model textures.
- Gimbal angle: Gimbal angle affects the aspect of the drone’s camera. A camera looking straight down will capture less of vertical surfaces like walls but a camera with an inclination will not capture the area directly below the drone and will therefore need to cover a larger area.
The set of photos could, in theory, be taken manually. In practice, it’s much more efficient to create an automated flight to record the required images. In this case a website was used (https://ancient.land) to generate a grid flight path. This tool outputs a csv file that can be read into Litchi. Litchi can then control the drone flying the grid pattern whilst taking photos at set intervals. If there are any areas of particular interest, additional photos can be taken manually and added to the data set.

This shows the grid pattern flights output by the online tool. These waypoints can then be imported into the flight app to automate the data acquisition.
This is a typical sample of the image data set gathered by the camera onboard the drone. Note how each image changes slightly giving a different perspective of the same objects. This is required to generate the point cloud.
Edit: Since completing this project DIDSA has learned that the functions at Https://ancient.land/ have been incorporated into the Litchi app and the third-party tool has been rendered redundant. Huge thanks to the developer of Ancient Land for their work in automating this time-consuming process.
Data processing
This data set can now be processed by ODM software. In this case the GUI version (WebODM) will be used.
Excellent instructions are available on the ODM website: https://www.opendronemap.org/ DIDSA recommend following the guidance carefully. A tremendous amount of resources have gone into this project which has made aerial surveying accessible. The instructions will not be repeated here as the project is continually evolving and any duplicated information will fall out of date.
As mentioned earlier, the data processing is hardware-intensive and is prone to failure. In particular, a large amount of RAM is required. Patience may be required while the software works through the data depending on the number of photos and their resolution. The following lessons were learned while using the software at DIDSA:
- Reducing the number of photos can result in a successful process. Try running a sample size of images to confirm they process as desired.
- ODM includes an option to resize the images before generating the point cloud. This can result in a successful operation where memory limitations could otherwise result in failure.
- Ensure other programs are not running at the same time. Maximise available system resource for ODM processes.
Data Analysis
The uses of these aerial surveys largely depend on the commissioning body. A few perceived uses are covered below:

Building measurements
The built-in tools allow various measurements to be taken. In this example a roof perimeter and height has been measured and could be used to provide accurate quotes for services such as scaffolding, materials or repairs.
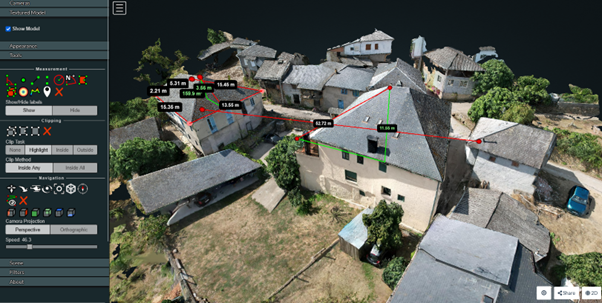
Taking an area survey also captures the surroundings. In this example the access route to the house can be seen along with the details of surrounding buildings. This can be used by contractors to ensure the correct equipment is available at the work site and that it can be delivered. It also allows correct selection of vehicles to send to site.

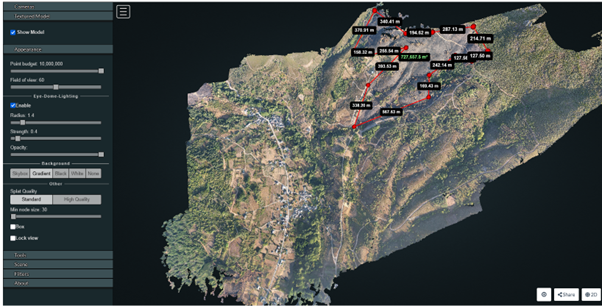
These two images show an aerial survey of the area surrounding the village. An area can be seen that has been destroyed by wild fires. The aerial survey allows measurements to be taken of the area destroyed and analysis of access routes to inspect the damage. Visual analysis also reveals that the fire moved quickly, destroying the undergrowth and leaving larger trees intact. This could be used to monitor the area’s recovery over time.
Conclusion
Aerial scans and surveys are more accessible now than ever before. The accuracy and detail mean they can be used for a wide variety of applications including site planning for infrastructure projects and construction works or monitoring for conservation and historic record keeping. If you are curious about aerial scans, please contact DIDSA. We would be happy to answer any questions about the exciting possibilities of this emergent technology and services are available on request.
References
Open Drone Map: https://www.opendronemap.org/
DJI: https://www.dji.com/
Litchi: https://flylitchi.com/
Mission Planning: https://ancient.land (legacy)